- 이전 게시글
이전 게시글과 이어지는 내용을 작성합니다. 이전 글을 읽고 오시는 것을 추천드립니다.
다단계 큐와 멀티 프로세서, 실시간 시스템까지
Multilevel Queue (다단계 큐)
다단계 큐란?
- 준비 큐를 아래와 같이 분리한 것을 말한다.
- Foreground Queue
- Backgorund Queue
- Foreground Queue
- 사용하는 스케줄링 방식
- Round Robin
- 특징
- 사용자에게 높은 응답속도를 제공해야 한다.
- 따라서, 응답속도 위주인 Round Robin을 사용한다.
- 사용하는 스케줄링 방식
- Background Queue
- 사용하는 스케줄링 방식
- FCFS
- 특징
- 처리량을 중점으로 두기 때문에, FCFS를 사용한다.
- 사용하는 스케줄링 방식
큐 간의 스케줄링
- 프로세스 스케줄링이 아닌, 어떤 큐를 사용할 것인지에 대한 스케줄링을 할 수 있다.
- ‘Foreground Queue’ vs ‘Background Queue’
- 스케줄링 방법
- 고정 우선순위 스케줄링 (Fixed Priority Scheduling)
- Foreground Queue의 Task 들이 완료될 때까지, Background Queue의 Task들이 기다린다.
- 즉, 우선순위가 낮은 Task들은 평생 기다려야할 수 있다.
- 왜냐하면 고정 우선순위이기 때문이다. (Aging을 사용하면 극복할 수 있는 문제이다.)
- 시분할 (Time Slice)
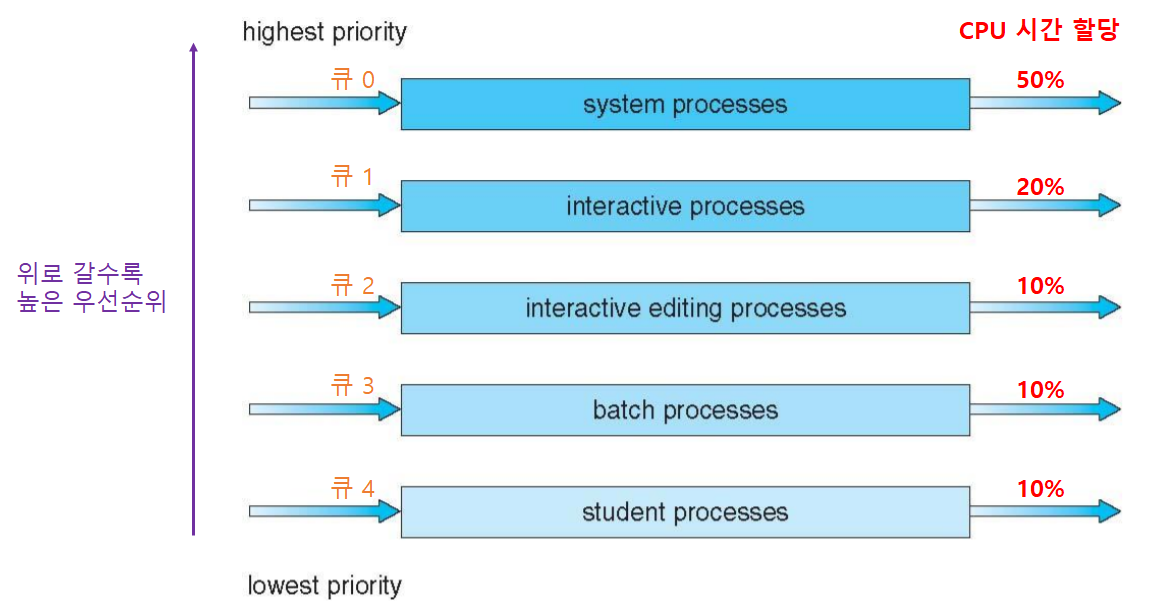
- 각 큐마다 사용할 수 있는 CPU 시간을 분배하는 방법이다.
- 예시) Foreground Queue = 80% CPU 시간 할당, Background Queue = 20% CPU 시간 할당
- 고정 우선순위 스케줄링 (Fixed Priority Scheduling)
다단계 큐 스케줄링 예시
다단계 피드백 큐
- 다단계 피드백 큐란?
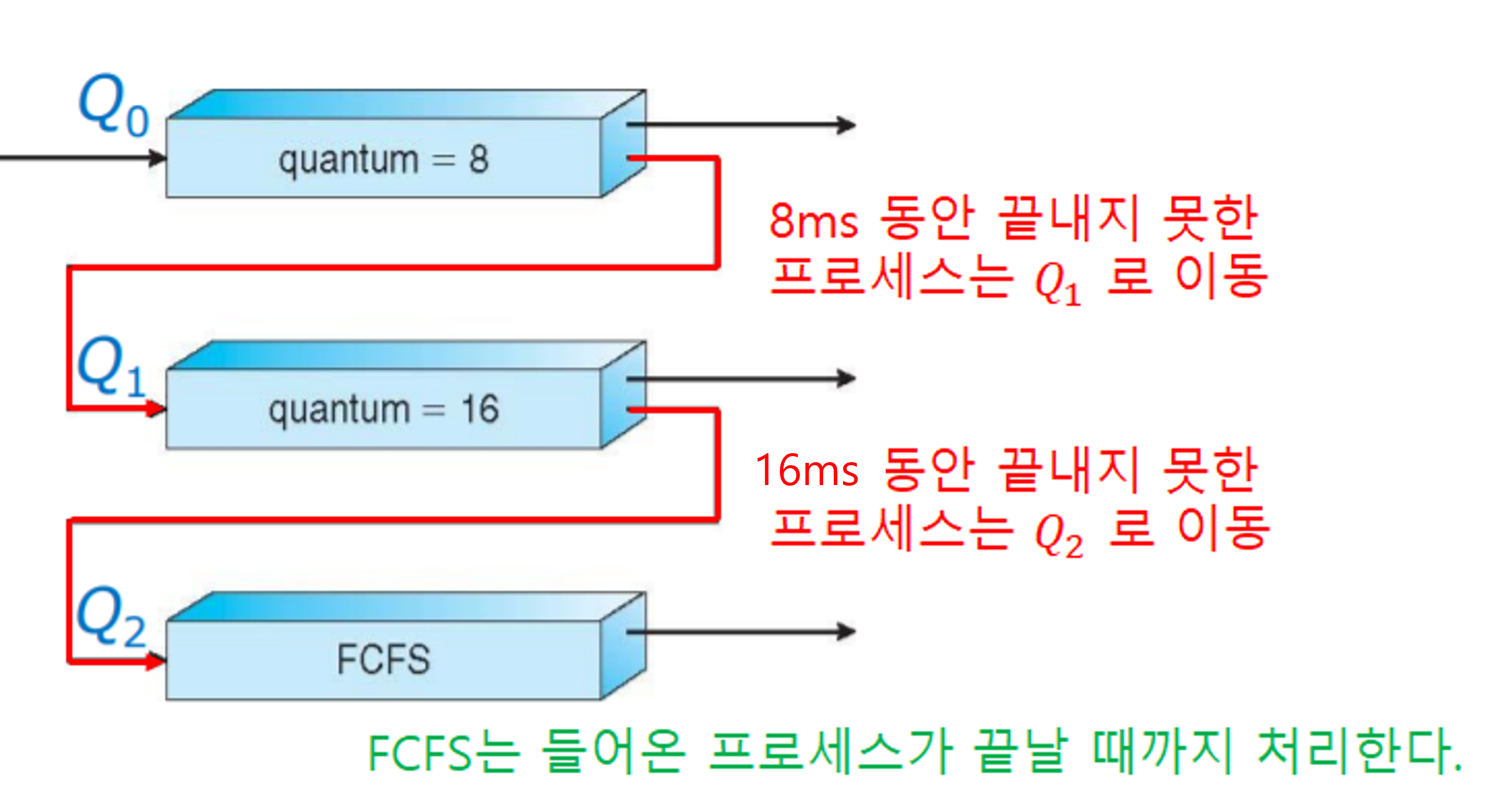
- 프로세스들이 큐 간 이동을 할 수 있는 다단계 큐 방식이다.
- 예시
- 존재하는 큐 종류
- Q0 : RR방식, q=8ms
- Q1 : RR방식, q=16ms
- Q2 : FCFS방식
-
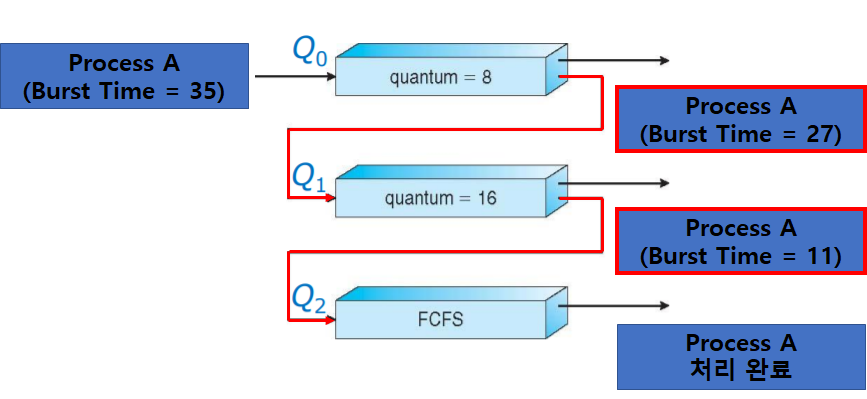
동작
-
Burst Time이 35인 프로세스 처리시
- 존재하는 큐 종류
Thread Scheduling
스케줄링에서의 쓰레드
-
쓰레드는 ‘유저 레벨’과 ‘커널 레벨’로 구분한다.
-
시스템에서 쓰레드를 지원할 경우, 프로세스가 아닌 쓰레드를 스케줄링한다.
- 대부분의 시스템에서 쓰레드를 지원한다.
- 따라서 대부분의 시스템이 쓰레드를 스케줄 한다.
- 쓰레드 스케줄링의 범위
- PCS
- Process-Contention Scope
- 프로세스 내에서 쓰레드끼리 경쟁한다.
- SCS
- System-Contention Scope
- 전체 시스템 내에서 쓰레드끼리 경쟁한다.
- PCS
- 리눅스에서의 쓰레드 스케줄링 예시
- 리눅스는 Pthread Scheduling 이라는 방식으로 쓰레드를 스케줄링한다.
- Pthread Scheduling은 SCS 기법에 기반한다.
다중 프로세서 스케줄링
다중 프로세서 스케줄링이란?
- Multi Core 시스템에서의 스케줄링 방식을 말한다.
- 다중 프로세서 스케줄링의 종류
- 비대칭 다중처리
- master 프로세서 혼자 모든 자료구조를 관리한다.
- 따라서, 병목현상이 발생한다.
- 대칭 다중처리 (SMP)
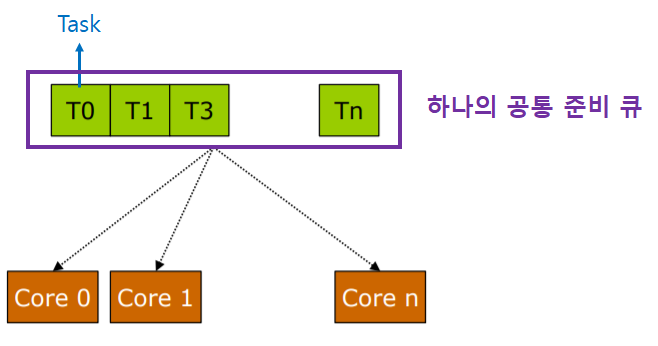
- “모든 프로세스가 하나의 Ready Queue에 들어가 있는 방식” 혹은,
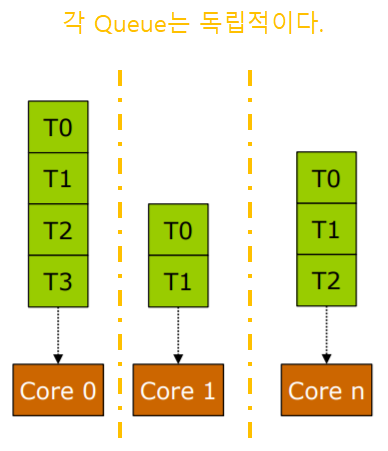
- “프로세스가 각 코어의 독립된 큐에 들어가 있는 방식” 이 존재한다.
비대칭·대칭 다중처리가 무엇인지 모른다면, 이전 게시글을 참고하자.
- 비대칭 다중처리
본 게시글에서는 대칭 다중처리에 대해서만 다루겠다. (가장 많이 사용되는 방식이다.)
SMP Queue 구조
-
모든 프로세스가 하나의 Ready Queue에 들어가 있는 방식
-
프로세스가 각 코어의 독립된 큐에 들어가 있는 방식 (Per-Core Queue)
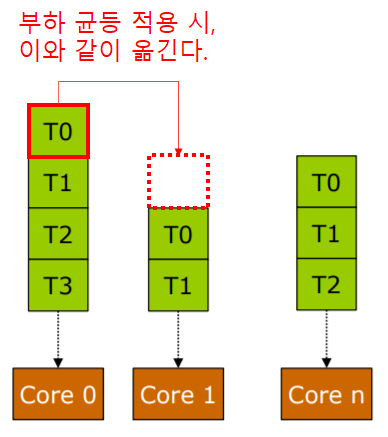
- 부하 균등 (Load Balancing)
- Core 당 할당된 Task 개수가 같게끔 맞추는 것을 말한다.
- 부하 균등의 문제점
- 부하 균등을 하고자 Task를 다른 Core로 옮기면 ⇒ Cache Miss 가 높아진다.
(자세한 것은 이후에 설명하겠다.) - Cache Miss가 발생하면, 메모리 멈춤 현상 (Memory Stalling) 이 발생한다.
- 메모리 멈춤 현상: 데이터를 가져오느라 프로세서가 idle상태에 놓이는 것
- 부하 균등을 하고자 Task를 다른 Core로 옮기면 ⇒ Cache Miss 가 높아진다.
- 메모리 멈춤 현상 방지책 = Affinity
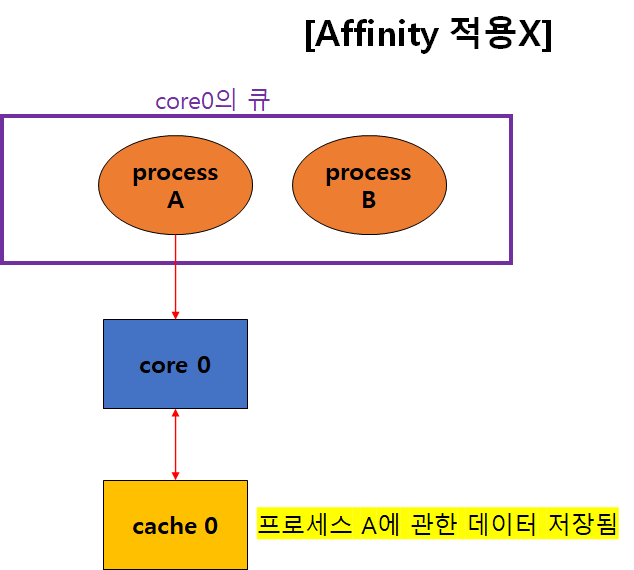
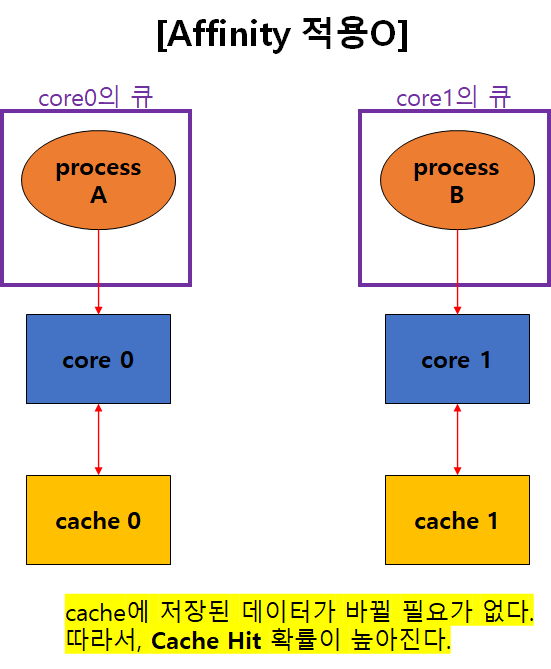
- Affinity란, 특정 Core에서만 Task가 수행되도록 하는 것이다. (Load Balancing을 하지 않는다.)
- Affinity 기능을 통해, Cache Hit 확률을 높일 수 있다.
- 따라서, Affinity 적용시 메모리 멈춤 현상을 최소화할 수 있다.
바로 아래에서 자세히 설명하겠다.
- 부하 균등 (Load Balancing)
Processor Affinity (프로세서 친화성)
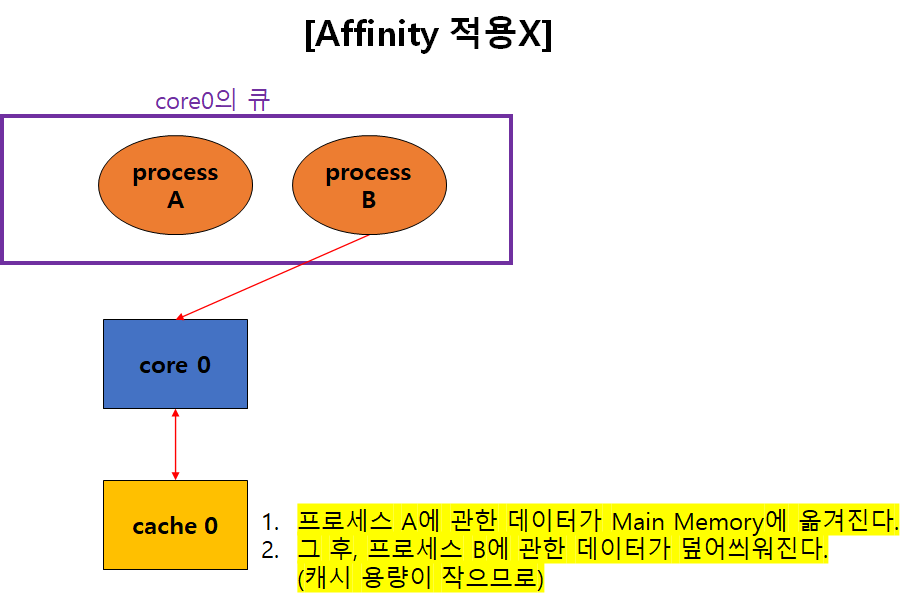
- Processor Affinity 적용을 안했을 때
-
step 1
-
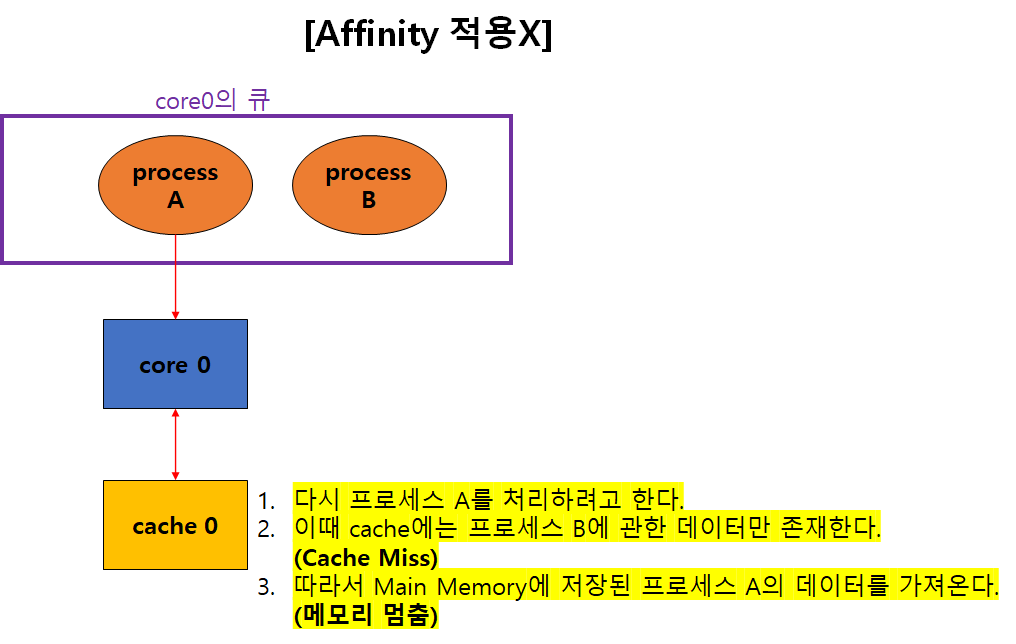
step 2
-
step 3
-
-
Processor Affinity 적용했을 때
부하 균등
- 부하 균등이란?
- 부하가 모든 CPU에 동일하게 분산되도록 하는 것이다.
- 특정한 CPU만이 많이 일하거나, 특정한 CPU가 놀지 않는 경우가 없도록 한다.
- 부하 균등의 방식
- 푸시 이주 (Push Migration)
- 개별 프로세서에 대한 부하를 주기적으로 확인한다.
- 특별히 많은 부하가 걸린 CPU가 있으면 다른 CPU로 부하를 분산한다.
- 풀 이주 (Pull Migration)
- 놀고 있는(Idle 상태의) CPU들이 바쁜 프로세서들의 Task를 가지고 온다.
- 푸시 이주 (Push Migration)
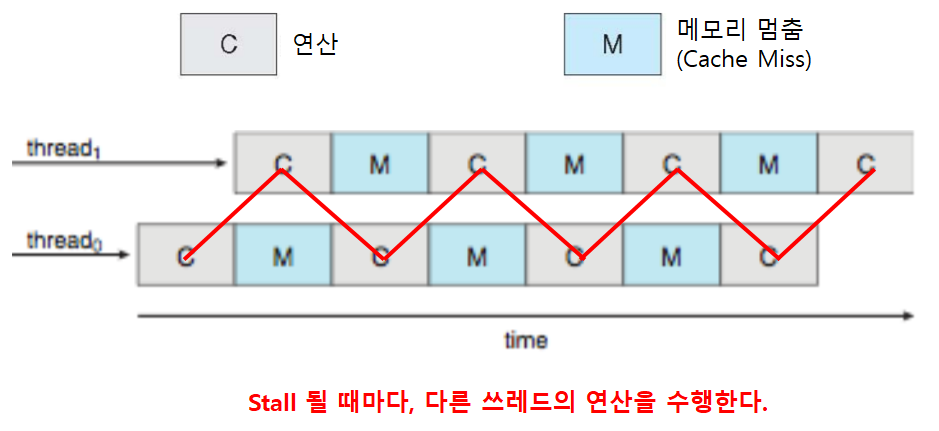
멀티코어 프로세서의 특성
- 보통 물리적 칩 내에, 여러 개의 Core 들을 배치하는 것이 일반적이다.
- 기술이 발전함에 따라, 코어마다 다중 쓰레드들도 더 많아지고 있다.
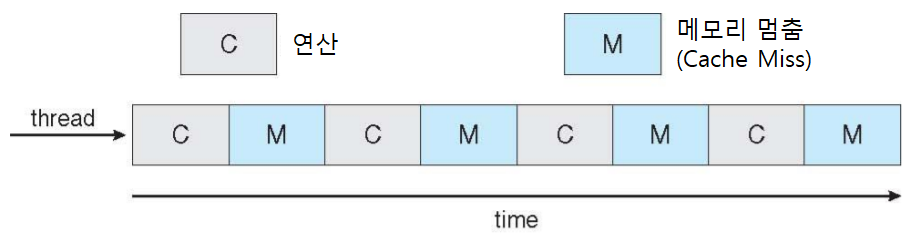
- 하나의 쓰레드가 메모리 탐색을 위해 Stall (메모리 멈춤) 되었을 때, 다른 쓰레드가 일하게 만들어서 효율을 더 올릴 수 있다.
-
단일 쓰레드일 때
-
다중 쓰레드일 때
-
Real-Time CPU Scheduling
실시간 시스템의 종류
- 연성 실시간 시스템
- 비교적 엄격하지 않은 조건
- 경우에 따라, Task 처리 데드라인에 못 맞출 수 도 있다.
- 예시) 이동통신
- 강성 실시간 시스템
- 매우 엄격한 조건
- 무조건 Task 처리 데드라인에 맞추는 것을 목표로 한다.
- 예시) 미사일 시스템
실시간 시스템에서의 지연의 종류
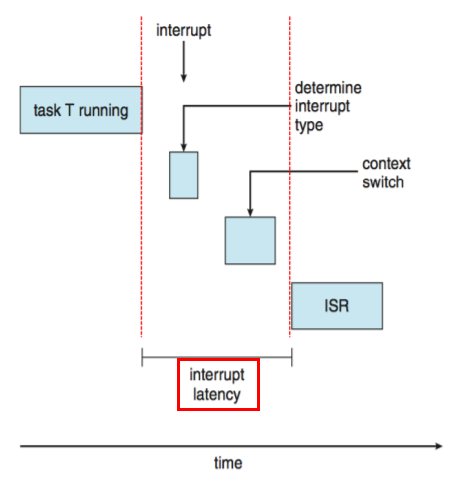
- Interrupt Latency
- 인터럽트 발생부터 ISR(Interrupt Service Routine) 실행까지의 시간을 말한다.
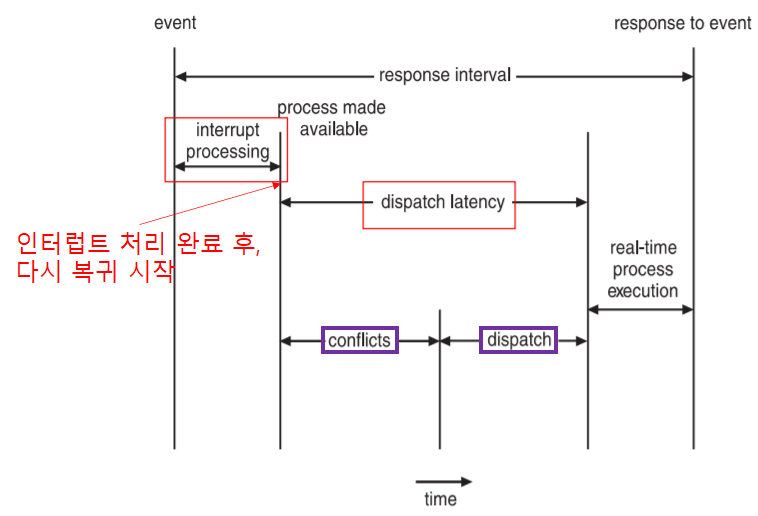
- Dispatch Latency
- conflicts 와 dispatch 시간의 합을 의미한다.
- conflicts : 실행 중인 프로세스를 Block하는 시간
- dispatch : 새 프로세스를 할당하는 시간
Priority-based Scheduling
- 선점형 우선순위 스케줄링을 통해, 연성 실시간 스케줄링을 구현한다.
- 강성 실시간 시스템에서는 이것만으로 부족하다.
- 주기성
- 프로세스들이 갖는 특성 중 하나이다.
- 특성 주기마다 스케줄링을 요구한다는 특성을 말한다.
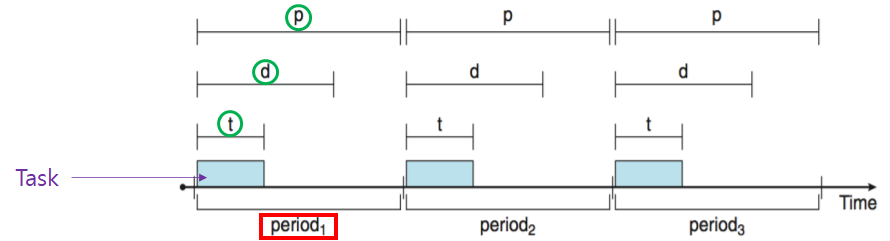
- 0 ≤ t ≤ d ≤ p
- t: 처리시간
- d: 마감시간(deadline)
- p: 주기
- 이들 간에, 위 관계가 성립해야 한다.
Rate Montonic Scheduling
- Rate Montonic Scheduling 이란?
- 선점형 정적 우선순위 스케줄링을 이용하는 스케줄링 방법이다.
- 주기가 짧은 Task = 높은 우선순위
- 주기가 긴 Task = 낮은 우선순위
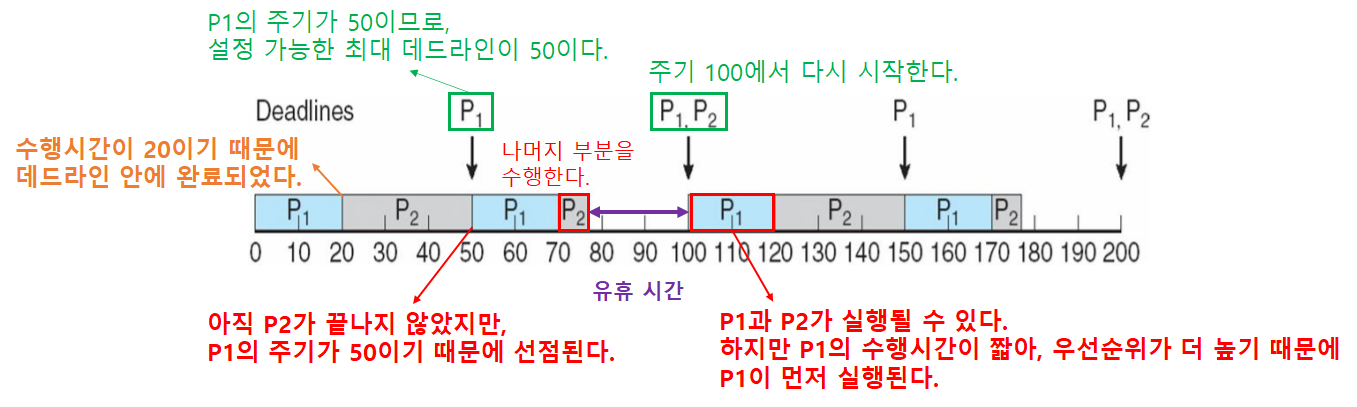
- Rate Montonic Scheduling 동작 예시
- 가정
- P1: 주기=50, 수행시간=20
- P2: 주기=100, 수행시간=35
최대로 허용되는 데드라인은 주기와 동일하다.
- 동작
- 두 프로세스(P1, P2)가 마감시간을 충족시켜 스케줄링이 가능한가?
- P1의 CPU 이용률 = 20/50 = 0.4
- P2의 CPU 이용률 = 35/100 = 0.35
- 총 CPU 이용률 = 0.75
- 총 CPU 이용률이 1을 넘지 않는다. ⇒ 즉, 데드라인을 충족시킬 수 있다.
-
스케줄링 예시
- 두 프로세스(P1, P2)가 마감시간을 충족시켜 스케줄링이 가능한가?
- 가정
- 실시간 스케줄링에서 주로 사용되는 스케줄링 방식
- Earliest Deadline First Scheduling (EDF)
CPU 스케줄링 알고리즘 평가
평가 종류
- 분석적 평가 (결정론적 모델링)
- 미리 결정되어 있는 매개변수(input)를 통해 성능 평가를 수행한다.
- 결과를 정확히 알 수 있다.
- 실시간 스케줄링을 평가하기엔 어렵다.
- 실시간 스케줄링의 경우, 모든 input을 미리 알 수 없기 때문이다.
-
input이란?
- 위와 같은 정보(Burst Time, …)들
- 시뮬레이션
- 분석적 평가를 하기 힘든, 실시간 스케줄링을 평가하는 방법이다.
본 포스팅에선 분석적 평가(결정론적 평가)만 다룬다.
결정론적 평가 예시
- 목표
- 모든 input을 알 때, 각 스케줄링 알고리즘에 대해 최소 평균 대기 시간을 구하자.
-
예시 input
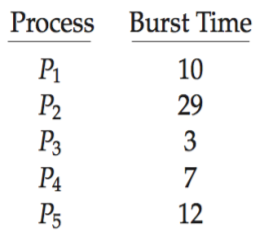
- 도착시간은 모두 0으로 같다.
- 예시 알고리즘
-
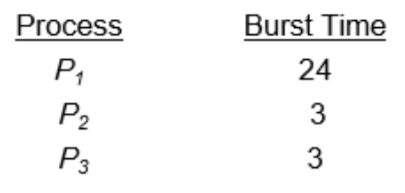
FCFS

- 최소 평균 대기 시간: (0+10+39+42+49)/5 = 28
-
비선점형 SJF (Shortest Job First)

- 최소 평균 대기 시간: (0+3+10+20+32)/5 = 13
-
RR (Round Robin)
- q = 10 일때

- 최소 평균 대기 시간: (0+(10+20+2)+20+23+(30+10))/5=23
- P1 대기시간: 0
- P2 대기시간: 0~10, 20~40, 50~52
- P3 대기시간: 0~20
- P4 대기시간: 0~23
- P5 대기시간: 0~30, 40~50
-
- 성결대학교 컴퓨터 공학과 강영명 교수님 (2021)
- Siberschatz et. al., 『Operating System Concepts 10th Ed.』