제어 유닛
개요
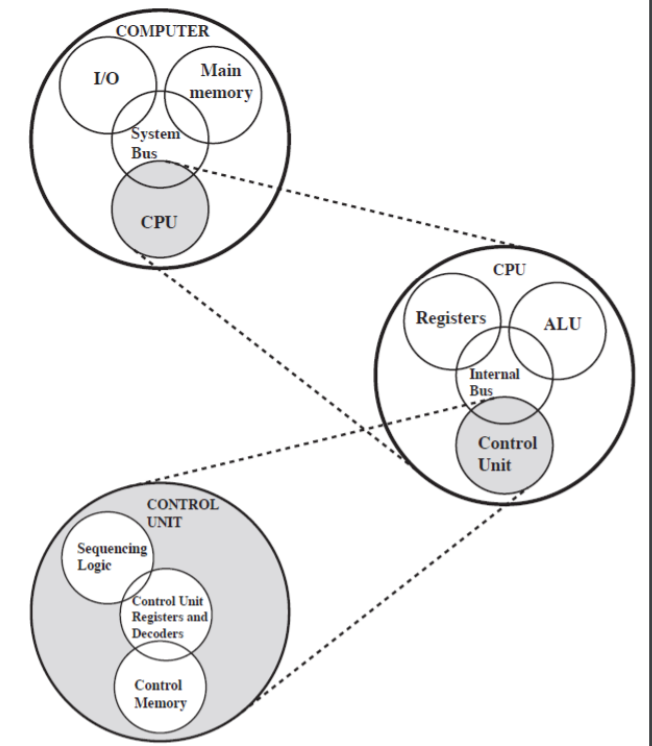
CPU 구조
프로세서의 기능 정의
- 명령어 세트
- 연산 코드
- 주소지정 방식
- 레지스터
- 시스템 버스
- I/O 모듈 인터페이스
- 기억장치 모듈 인터페이스
- 시스템 버스와 운영체제
- 인터럽트 처리 조직
제어 유닛
- 제어 유닛이란?
- 프로세서 내의 여러가지 요소들을 제어한다.
- 컴퓨터 전체를 작동시키는 엔진이다.
- 프로세서의 한 부분으로서 실제로 어떤 일이 일어나게끔 한다.
- 실행될 프로그램에 의해 결정되는 순서대로 마이크로 연산을 실행한다.
- 마이크로 연산: 기계 명령어가 실행되는 과정 (자세한 것은 조금있다 다룬다.)
- 제어유닛은 각 마이크로 연산을 실행시키기 위한 제어신호를 발생시킨다.
- 실행될 프로그램에 의해 결정되는 순서대로 마이크로 연산을 실행한다.
- 제어 유닛이 생성하는 제어신호의 종류
- 프로세서 외부로의 제어신호
- 기억장치 및 I/O 모듈과의 데이터 교환
- 프로세서 내부로의 제어신호
- 레지스터들 간에 데이터 이동
- ALU 연산
- 내부 연산 통제
- 프로세서 외부로의 제어신호
- 제어 유닛 구현 방법
- 하드 와이어
- H/W 기반 제어 방식
- 마이크로 프로그래밍
- S/W 기반 제어 방식
우리는 마이크로 프로그래밍을 위주로 알아볼 것이다.
- 하드 와이어
마이크로 연산
마이크로 연산?
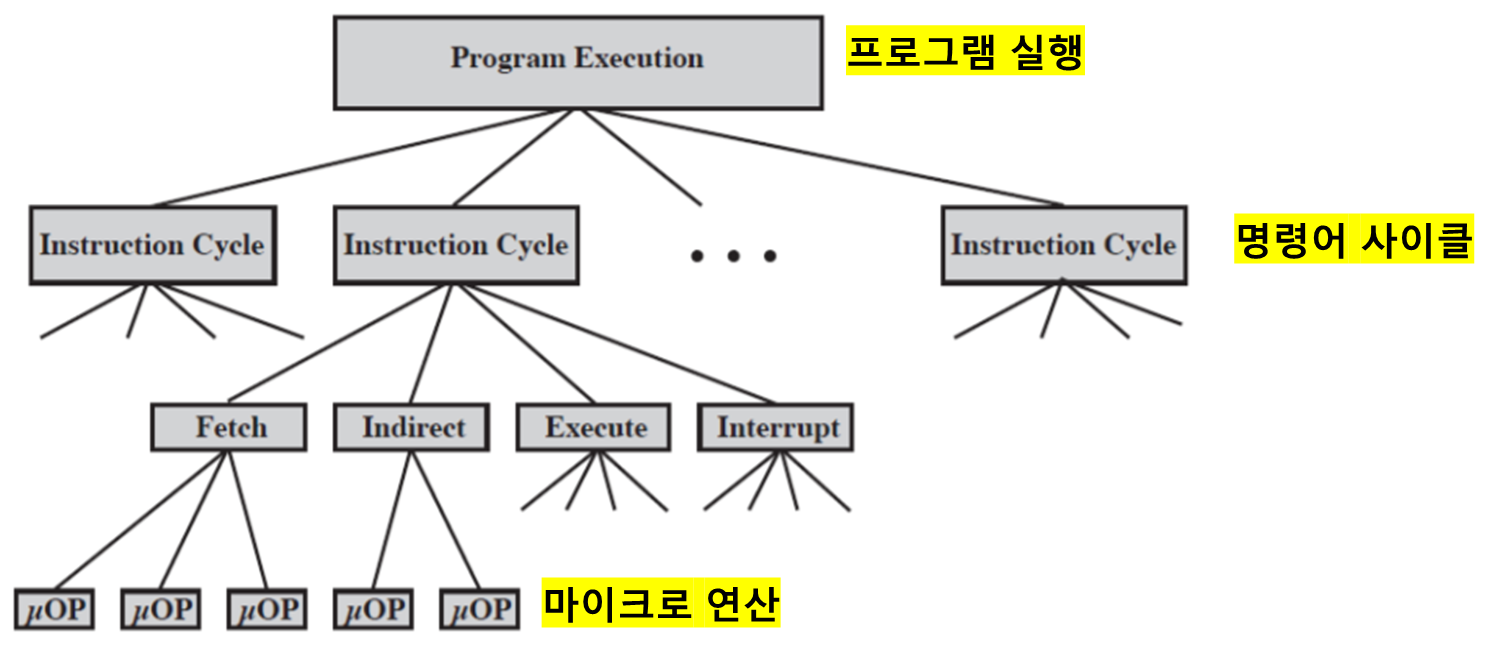
- 프로그램
- 일련의 명령어 사이클로 구성되어 실행된다.
- 명령어 사이클
- 다수의 더 작은 단위(서브 사이클)들로 구성된다.
- 서브 사이클
- 프로세서 레지스터를 포함하고 있는 일련의 단위로 구성된다.
- 이것을 마이크로 연산이라고 한다.
- 가장 세분화된 프로세서의 기능적 or 원자 연산이다.
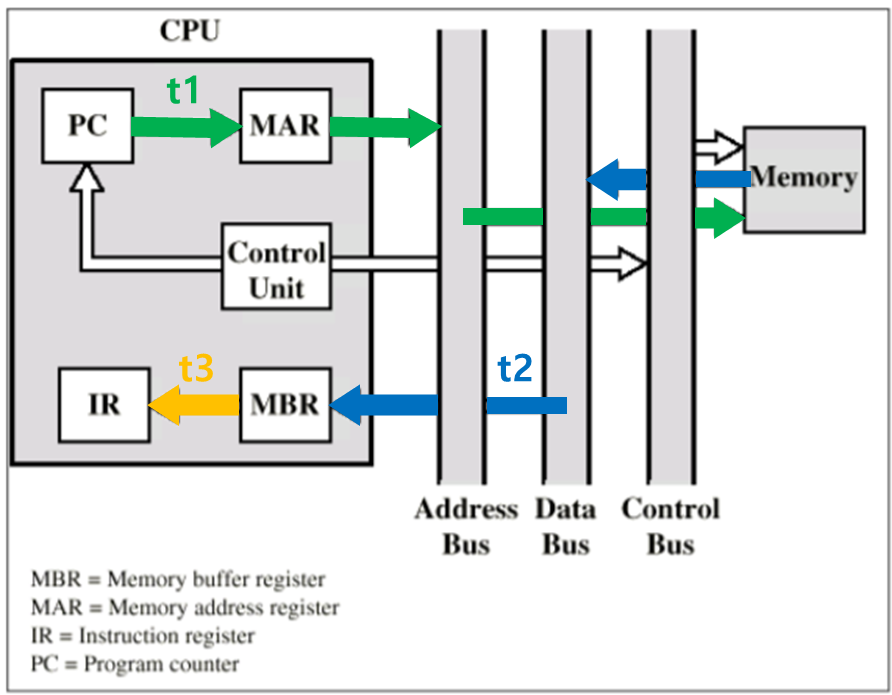
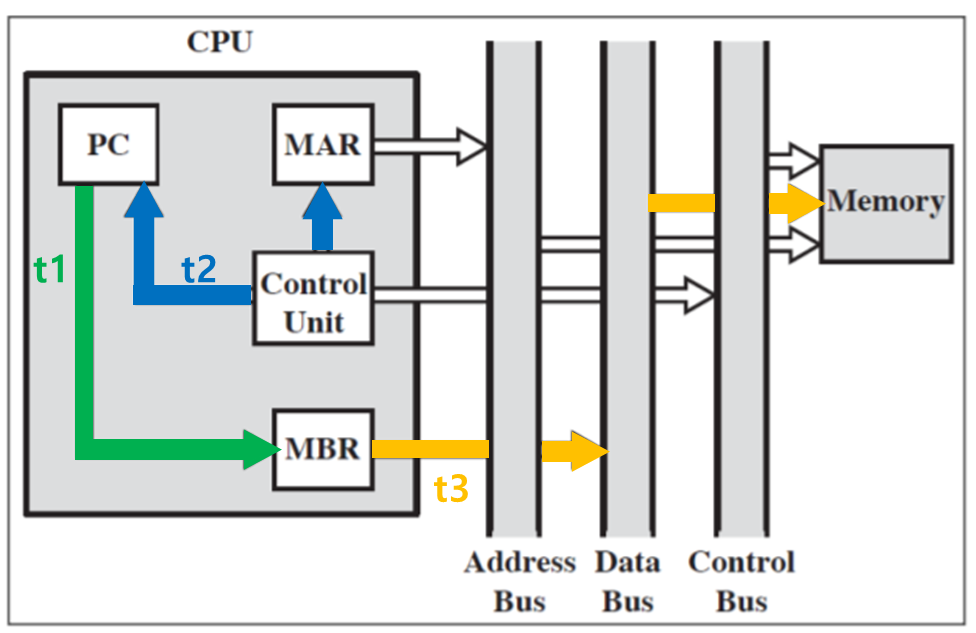
명령어 인출 과정
- PC에 저장된 주소를 MAR(기억장치 주소 레지스터)로 옮긴다.
- MAR이 시스템 버스의 주소 버스에 연결된 유일한 레지스터이다.
- 명령어를 가져온다.
- (MAR 내에 있는) 원하는 주소가 주소 버스로 내보내지고, 제어 유닛은 제어 버스로 READ 명령을 보낸다.
- 그 결과로, 기억장치로부터 읽혀진 명령어는 데이터 버스를 통하여 MBR(기억장치 버퍼 레지스터)에 저장된다.
- 다음 명령어의 실행 준비를 위해 PC가 1 증가한다.
- MBR의 내용을 IR(명령어 레지스터)로 이동시킨다.
- 간접 사이클이 수행될 경우를 위해 MBR을 비워두기 위함이다.
간접 사이클에 대한 내용은 이전 게시글을 참고하자.
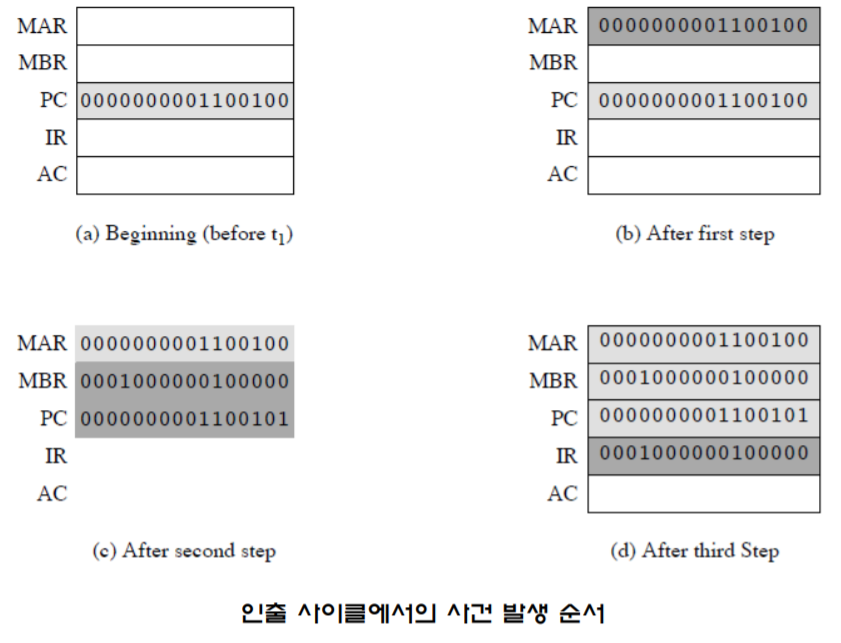
마이크로 연산: 명령어 인출 사이클
- 명령어 인출의 마이크로 연산 절차
- t1
- MAR ← (PC)
- t2
- MBR ← memory
- PC ← (PC) + I
I : 명령어의 길이
- t3
- IR ← (MBR)
- t1
- 한 클록 사이클
- t1, t2, t3 은 각각 하나의 클록 사이클 시간을 나타낸다.
- t1 : 첫번째 클록 사이클 시간
- t2 : 두번째 클록 사이클 시간
- t3 : 세번째 클록 사이클 시간
- 인출 사이클 구성
- 3단계의 클록(t)
- 4개의 마이크로 연산
-
시각화
마이크로 연산: 간접 사이클
- 명령어가 인출되면, 제어 유닛은 간접 주소지정 방식을 사용한 오퍼랜드가 있는지 확인한다.
- 명령어가 간접 주소지정 방식을 사용할 때
- 간접 사이클이 실행 사이클보다 먼저 수행되어야 한다.
- 명령어가 간접 주소지정 방식을 사용할 때
- 간접 사이클의 마이크로 연산 절차
- t1
- MAR ← (IR(address))
- address : 유효 주소가 담긴 곳의 주소
유효 주소에 대한 내용은 이전 게시글을 참고하자.
- MAR ← (IR(address))
- t2
- MBR ← memory
- memory에서 유효 주소값을 가져온다.
- MBR ← memory
- t3
- IR(address) ← (MBR(address))
- address : 유효주소값
- IR(address) ← (MBR(address))
- t1
- 상세 설명
- IR의 주소 필드가 MBR로부터 들어오는 주소로 갱신된다.
- 이때 들어오는 주소는 직접주소(유효주소)이다.
- 그러면 IR은 이제 간접 주소 지정방식이 사용되지 않은 상태가 된다.
- 실제로 원하는 명령어의 주소가 IR에 담기기 때문이다.
- 간접 사이클을 마치고나면, 최종적으로 실행 사이클을 위한 준비가 완료된다.
- IR의 주소 필드가 MBR로부터 들어오는 주소로 갱신된다.
마이크로 연산: 인터럽트 사이클
- 인터럽트 사이클이란?
- 인터럽트가 발생했을 때, 수행되는 사이클이다.
- 인터럽트 사이클의 마이크로 연산 절차
- t1
- MBR ← (PC)
- 복귀할 주소값을 백업할 준비를 한다.
- 참고로, 주소값을 데이터처럼 처리하기 때문에 MBR에 넘긴다.
- MBR ← (PC)
- t2
- MAR ← save-address
- save-address: 복귀할 주소가 저장된 곳의 주소
- PC ← routine-address
- routine-address: ISR의 시작주소
- MAR ← save-address
- t3
- memory ← (MBR)
- MBR에 담긴 복귀 주소값을 메모리에 저장한다.
- memory ← (MBR)
- t1
-
시각화
- 상세 설명
- PC의 내용이 MBR로 보내져, 인터럽트 수행이 끝난 후에 복귀할 때 사용할 수 있게끔 한다.
- MAR에는 PC의 내용이 저장될 위치의 주소가 적재된다. 그리고 PC에는 인터럽트 처리 루틴의 시작 주소가 적재된다.
- PC의 이전 값을 가지고 있는 MBR의 내용을 기억장치에 저장한다.
마이크로 연산: 실행 사이클 - ADD
- 인출·간접·인터럽트 사이클과 실행 사이클의 차이점
- 인출·간접·인터럽트 사이클은 매번 동일한 마이크로 연산이 반복된다.
- 실행 사이클은 N개의 서로 다른 연산코드(실행 명령어)를 위해, N가지 마이크로 연산들이 존재한다.
- 즉, 실행 사이클은 어떤 실행인지에 따라 마이크로 연산들이 다양하게 사용된다.
ADD R1, X의 마이크로 연산 절차ADD R1, X의 의미: R1(레지스터1)의 값과 X값을 더하고, R1에 결과를 저장한다.- t1
- MAR ← (IR(address))
- address: 연산할 X의 주소
- MAR ← (IR(address))
- t2
- MBR ← memory
- X에 저장된 값을 MBR에 전달한다.
- MBR ← memory
- t3
- R1 ← (R1) + (MBR)
- ALU를 통해, 값을 계산한 뒤 R1에 저장한다.
- R1 ← (R1) + (MBR)
- 상세설명
- 만약 레지스터(R1)가 아닌 다른 메모리 공간에 결과를 저장한다면, 결과 저장 위치 계산 등의 과정이 추가적으로 필요해진다.
마이크로 연산: 실행 사이클 - ISZ
ISZ X의 마이크로 연산 절차ISZ X의 의미: X의 값을 1 증가시키고, 결과가 0이면 바로 다음 명령어를 스킵한다.- t1
- MAR ← (IR(address))
- address: 1 증가시킬 값이 저장된 X의 주소
- MAR ← (IR(address))
- t2
- MBR ← memory
- X에 저장된 값을 MBR에 전달한다.
- MBR ← memory
- t3
- MBR ← (MBR) + 1
- t4
- memory ← (MBR)
- if (MBR) == 0 then PC ← (PC) + I
- (PC) : 다음에 수행할 명령어의 주소가 담겨있다.
- I : 명령어 하나의 길이
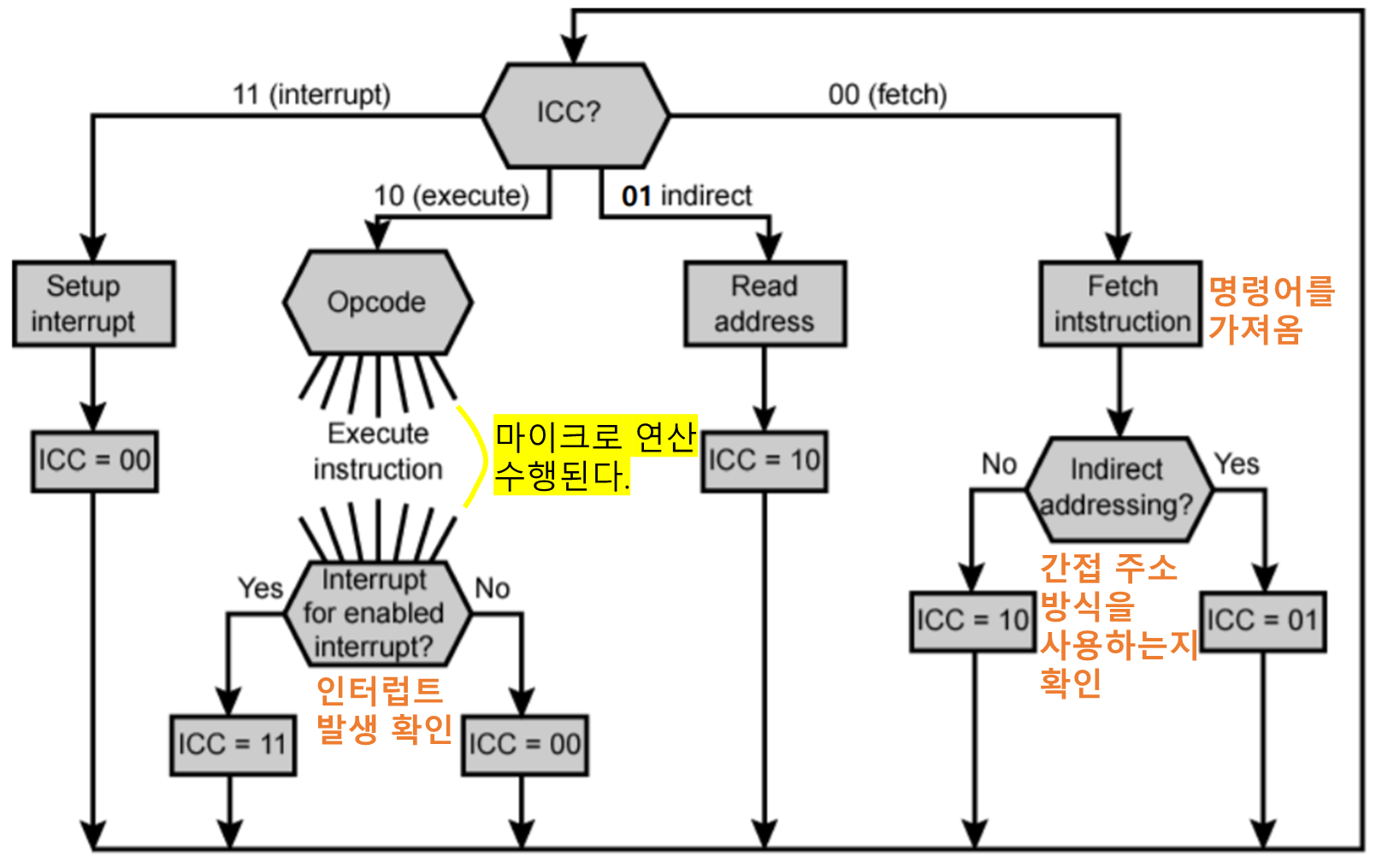
명령어 사이클 정리
- 명령어 사이클의 각 단계는 마이크로 연산으로 구성된다.
- 인출, 간접, 인터럽트, 실행 사이클
- 명령어 사이클 코드 (Instruction Cycle Code: ICC)
- ICC를 이용하여 프로세서의 실행 위치를 확인한다.
- 즉 ICC를 통해, 제어 유닛이 어떤 제어를 해야하는지 판단한다.
- ICC=00 : 인출
- ICC=01 : 간접
- ICC=10 : 실행
- ICC=11 : 인터럽트
프로세서의 제어
제어 유닛의 특성을 결정하는 요소
아래 요소들이 제어 유닛의 특성을 결정한다.
- 프로세서의 기본 구성요소
- ALU, 레지스터, 내부/외부 데이터 통로, 제어 유닛
- 프로세서가 실행할 마이크로 연산
- 마이크로 연산이 실행되기 위해 제어 유닛이 수행해야 할 기능
제어 유닛의 기능
- 순서 제어
- 실행될 프로그램에 근거하여, 프로세서가 일련의 마이크로 연산을 적절한 순서대로 처리하도록 해준다.
- 실행
- 각 마이크로 연산이 실행되도록 해준다.
제어신호에 의해서 ‘순서제어’와 ‘실행’이 처리된다.
제어 신호
- 제어 유닛이 기능을 수행하려면 아래 항목들이 필요하다.
- 입력
- 시스템의 상태를 결정해주는 것
- 출력
- 시스템 동작을 제어하는 것
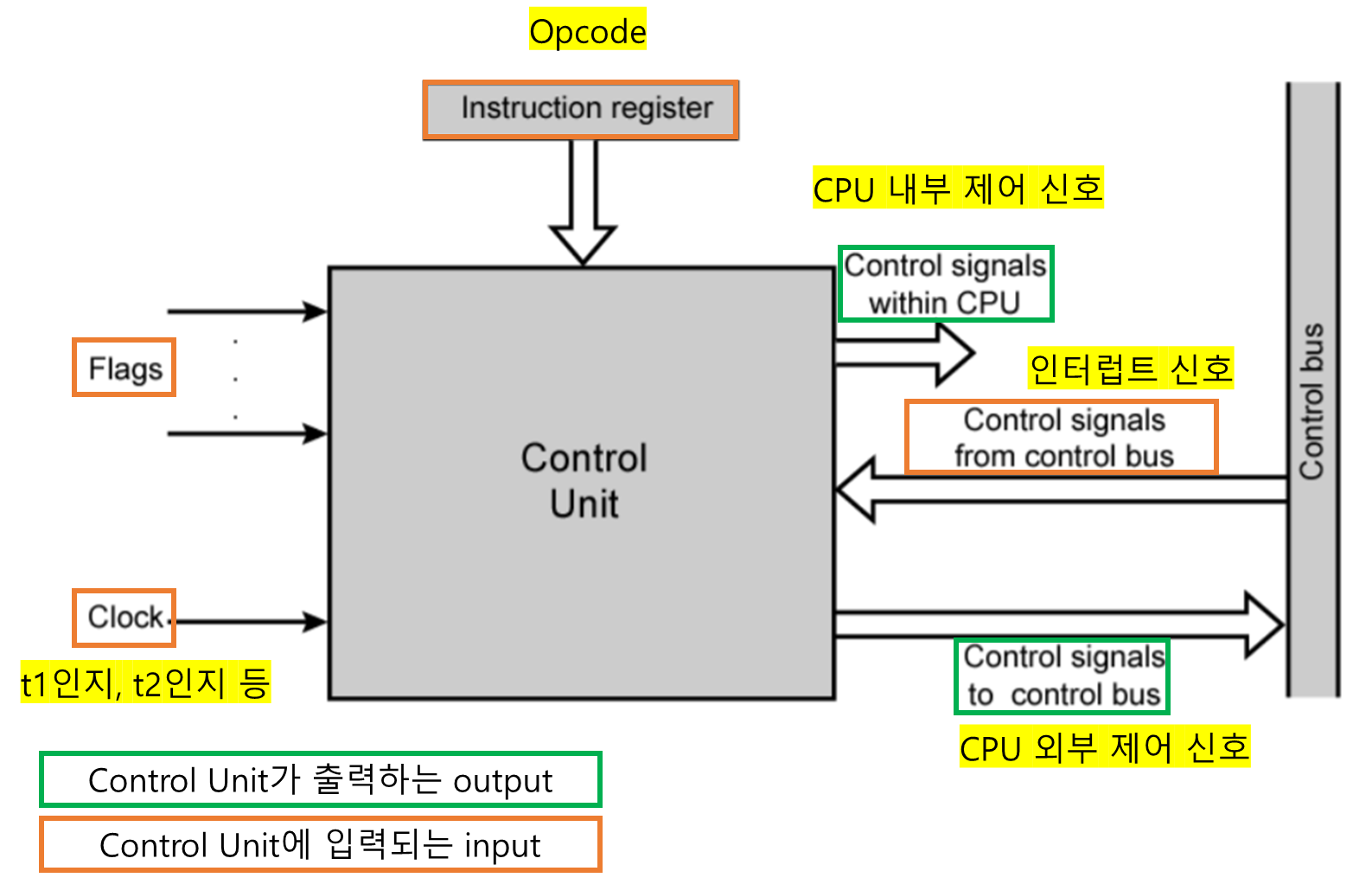
- 입력
- 제어 신호의 종류
- 제어유닛 input 신호
- 제어유닛 output 신호
- 매 클록마다 제어 유닛은 모든 입력을 읽어들이고 제어신호를 발생시킨다.
하나씩 자세히 알아보자.
입력 제어 신호
- 클록
- 제어 유닛이 시간을 지키도록 하는데 사용된다.
- t1, t2, … 을 구분한다.
- 프로세서 사이클 시간 or 클록 사이클 시간
- 명령어 레지스터
- Opcode에 따라, 어떤 마이크로 연산을 실행할지 결정한다.
- 플래그
- 프로세서의 상태와 이전 ALU 연산의 결과를 검사한 결과를 나타낸다.
- 제어 버스로부토 들어오는 제어 신호들
- 인터럽트 신호와 확인 신호 등
출력 제어 신호
- 프로세서 내의 제어 신호
- 레지스터들 간의 데이터 전송을 발생시키는 신호이다.
- 특정 ALU 기능들을 활성화시키는 신호들이다.
- 제어 버스로 나가는 제어 신호
- 기억장치로 보내지는 제어 신호나
- I/O 모듈로 보내지는 제어 신호가 있다.
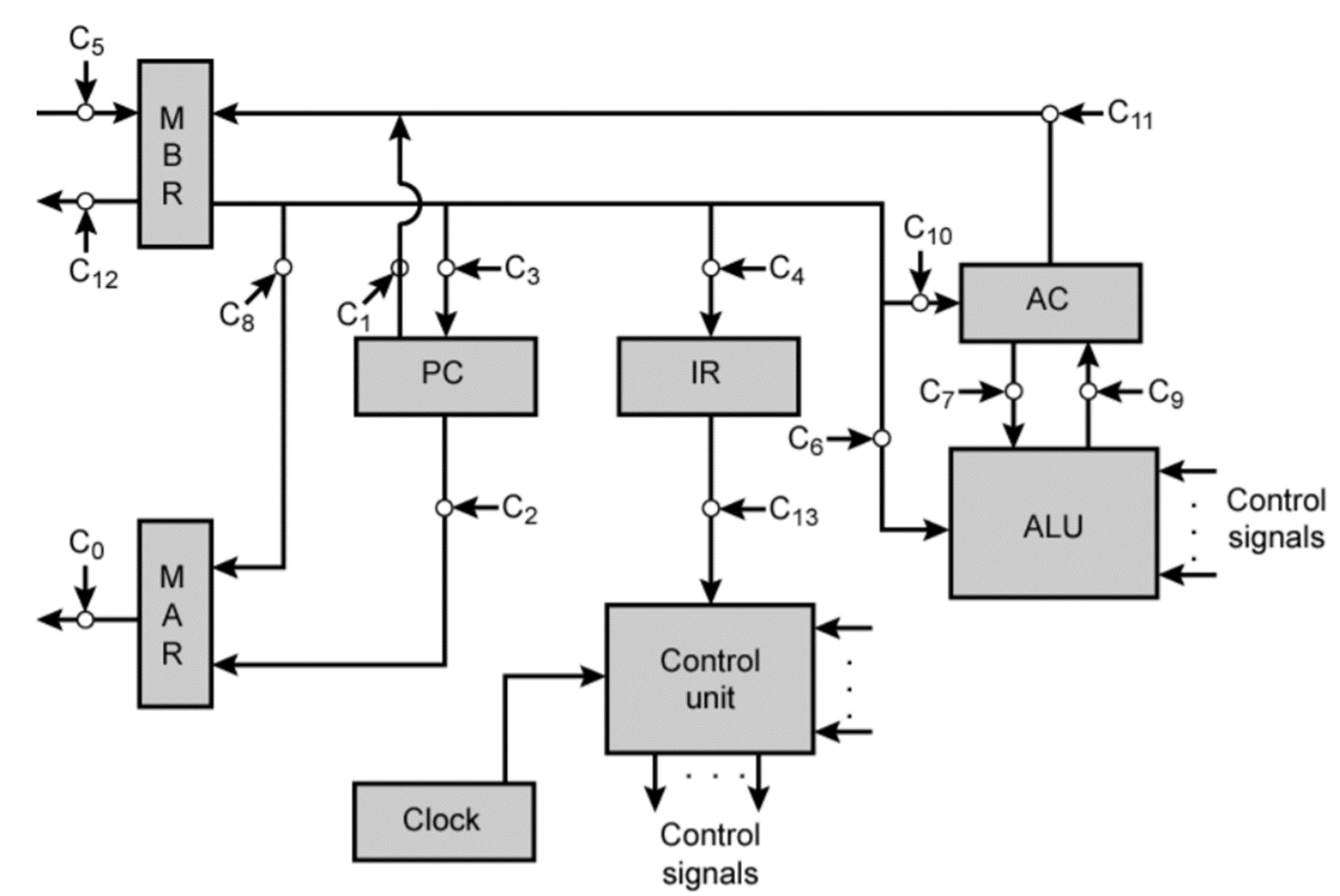
마이크로 연산에 필요한 제어 신호들
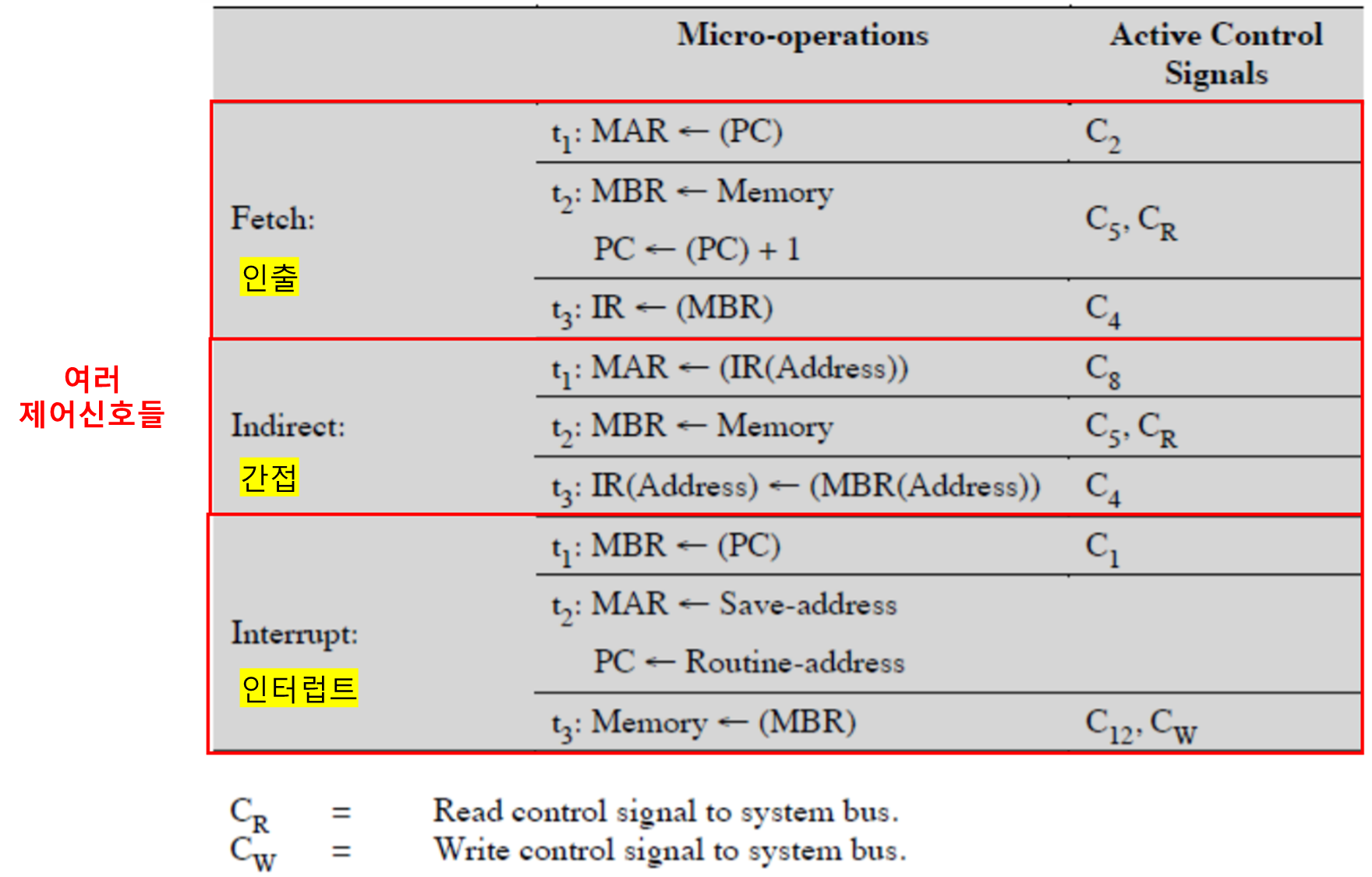
제어 신호 예시
마이크로프로그램 방식의 제어 유닛
마이크로프로그램 방식이란?
- 제어 기억장치에 저장된 마이크로 프로그램을 실행하는 방식으로 제어 유닛을 동작시키는 것이다.
- 마이크로프로그램?
- 마이크로 명령어들의 집합
- 마이크로 명령어?
- 명령어 사이클에서 ‘각 주기(t1, t2, …)에서 실행되는 각 마이크로-연산’을 지정해주는 2진 비트들
- 마이크로 명령어 == 제어 단어
- 마이크로명령어의 실행 결과로 제어 신호를 발생시킨다.
- 마이크로프로그램 방식을 사용하면, 명령어 설계가 바뀌어도 제어 메모리에 저장된 프로그램만 변경하면 된다.
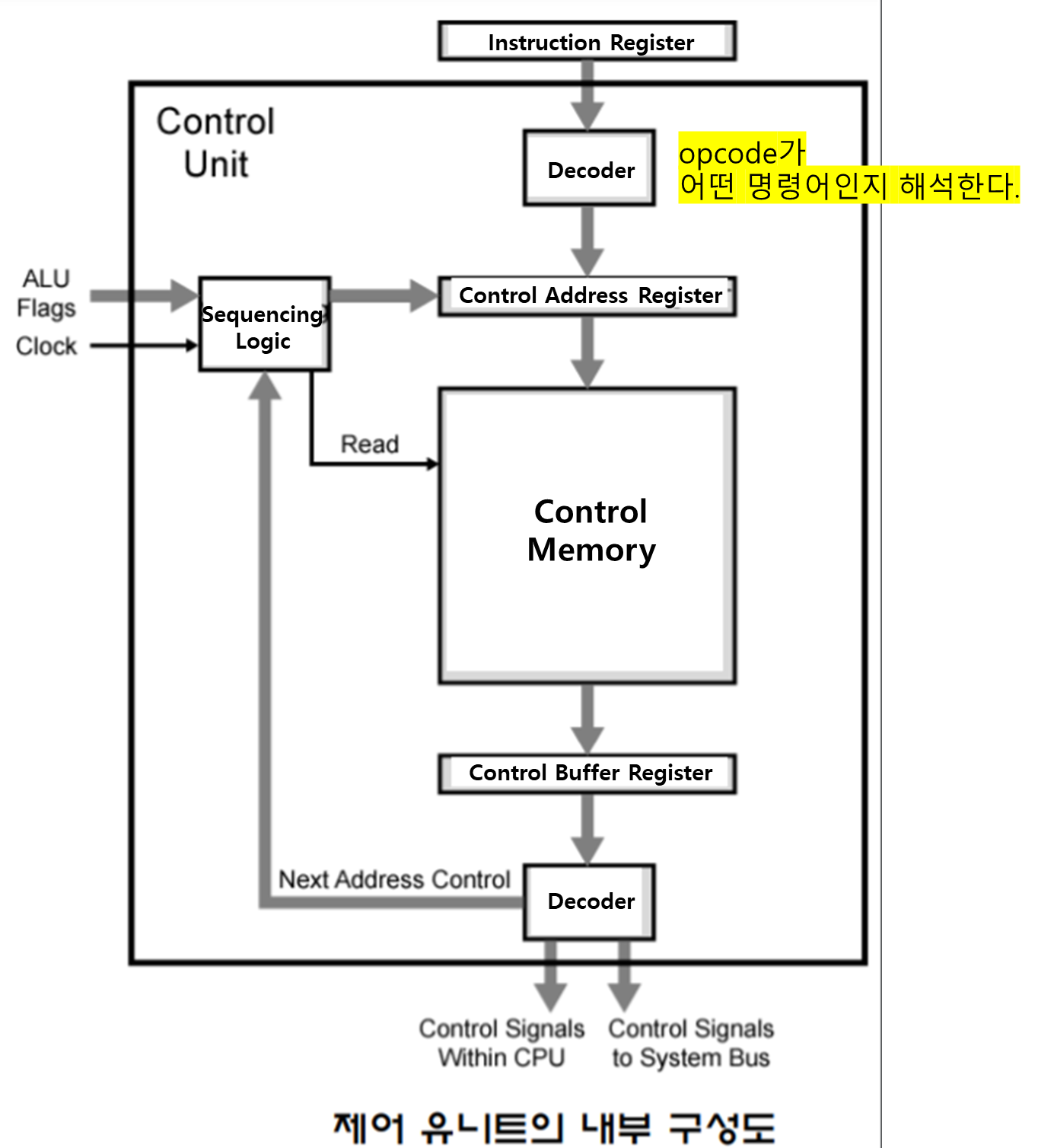
제어 유닛의 구성
- 명령어 해독기 (Decoder)
- 명령어 레지스터(IR)로부터 들어오는 명령어의 연산코드를 해독하여, 해당 연산을 수행하기 위한 루틴의 시작 주소를 계산한다.
- 제어 주소 레지스터 (Control Address Register, CAR)
- 다음에 실행할 마이크로명령어의 주소를 저장한다.
Program Counter와 유사하다.
- 제어 기억장치 (Control Memory)
- 마이크로 프로그램이 저장되는 공간이다.
- 제어 버퍼 레지스터 (Control Buffer Register, CBR)
- 제어 기억장치로부터 읽혀진 마이크로명령어를 일시 저장한다.
- 순서 제어 유닛 (Sequencing Logic)
- 마이크로명령어의 실행순서를 결정한다.
- 제어 주소 레지스터에 주소를 적재한다.
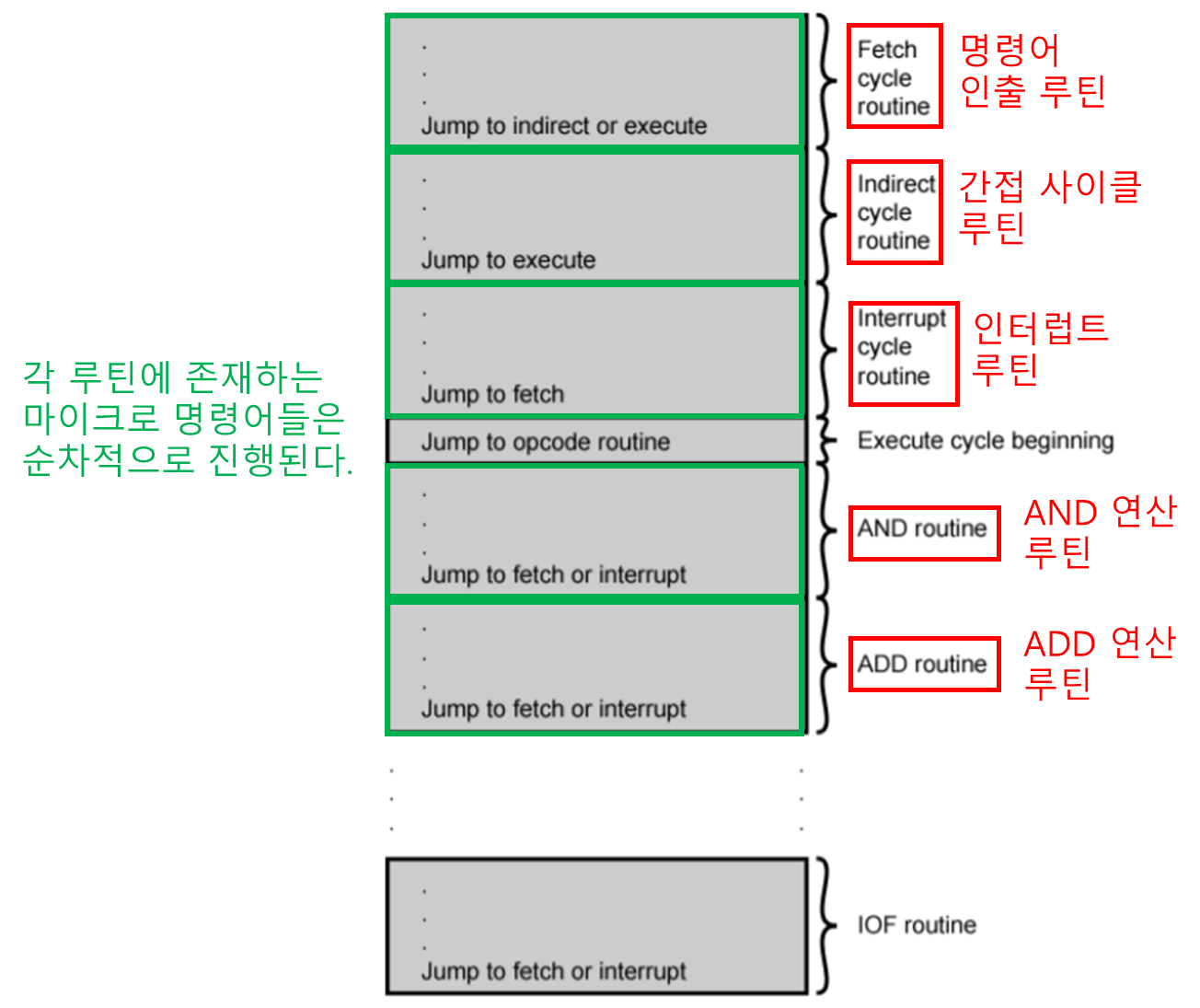
제어 기억장치
- 제어 단어 (or 마이크로 명령어)들이 저장되어 있다.
- 각 루틴 내의 마이크로명령어들은 순차적으로 진행된다.
-
예시
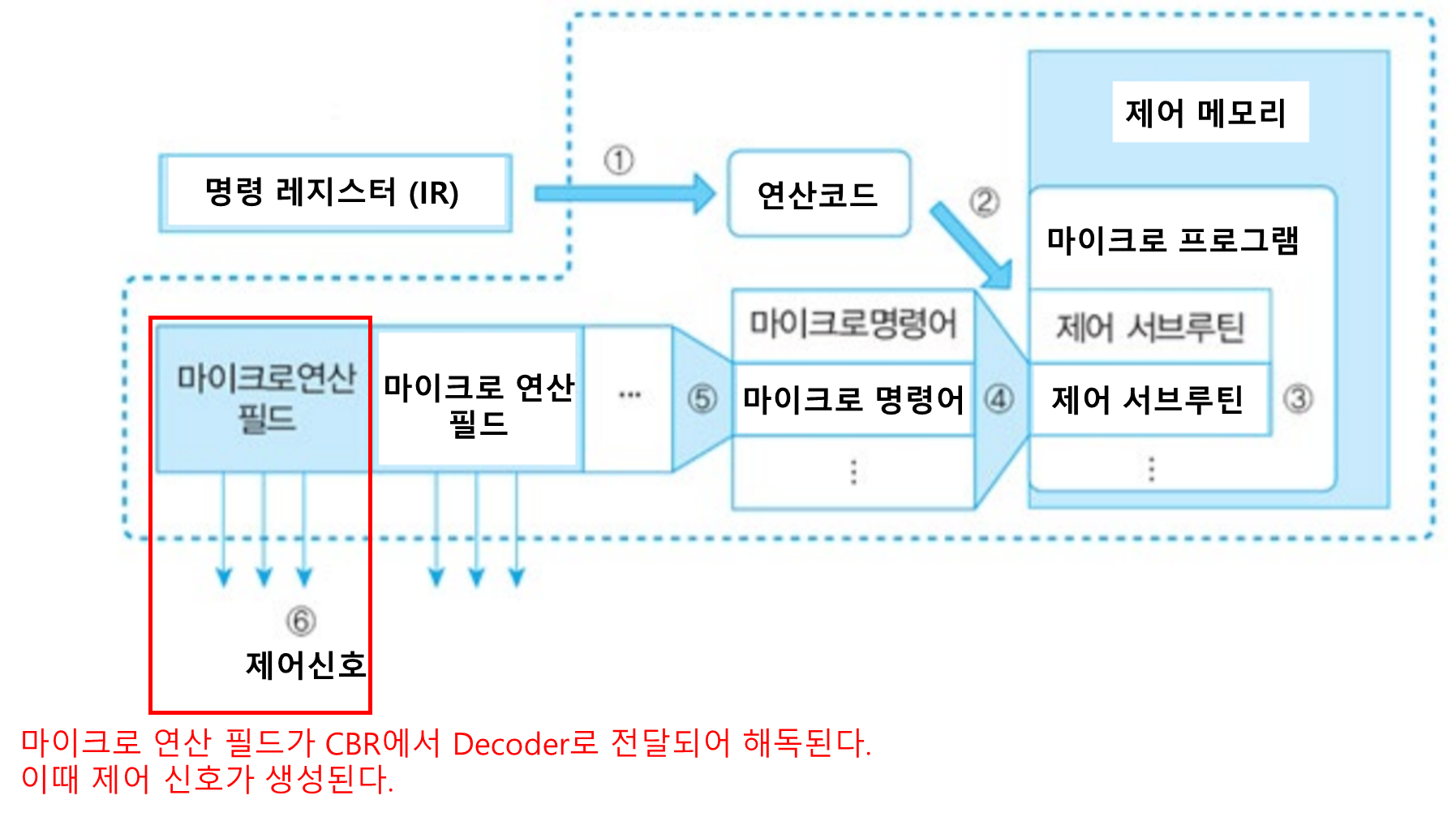
제어 유닛 동작 순서
- 명령어 레지스터에 들어온 명령어(Main Memory에 저장된 기계명령어)를 해독해, 연산코드(opcode)를 구한다.
- 연산코드에서 해당 명령에 필요한 제어 서브루틴의 시작주소를 계산한다.
- 명령어를 실행하기 위해, 순서제어 논리 유닛(Sequencing Logic)이 제어 기억장치로 READ 명령을 보낸다.
- 제어 주소 레지스터(CAR)에 명시된 제어 기억장치의 주소에 저장되어 있는 단어가 읽혀져서 제어 버퍼 레지스터(CBR)로 보내진다.
- CBR의 내용에 따라, 제어 신호들과 다음 주소 정보가 발생된다.
- 순서제어 유닛은 CBR과 ALU 플래그에 근거하여 새로운 주소를 CAR에 적재한다.
마이크로프로그램 제어 방식
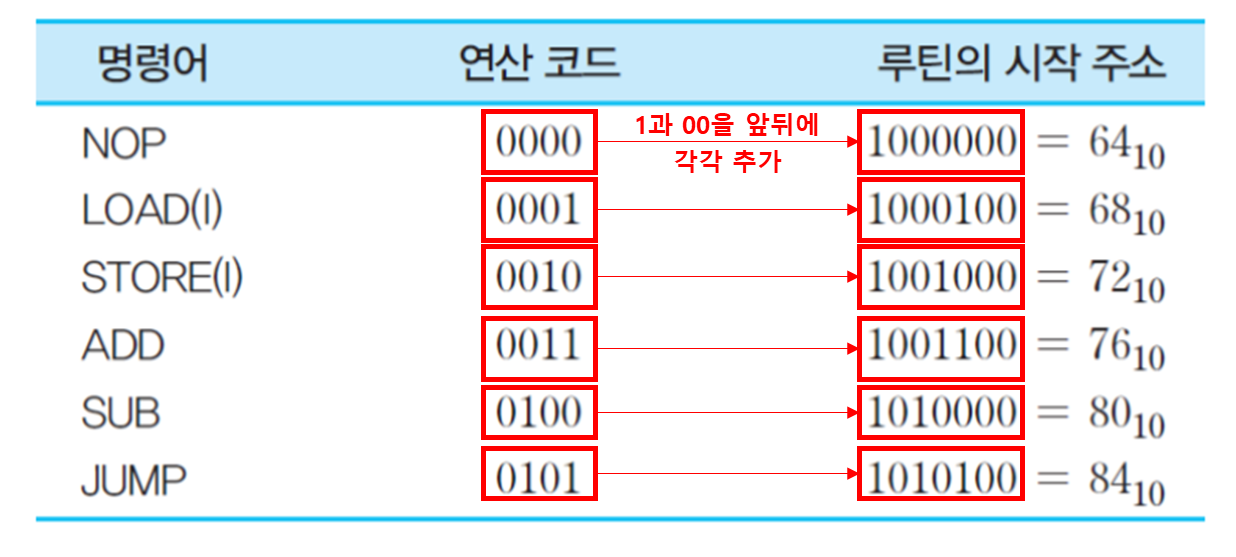
제어 서브루틴의 시작 주소 계산
- 명령어 해독기(Decoder)는 연산코드를 이용하여 제어 기억장치 내 해당 실행 사이클 루틴의 시작주소 를 찾는다.
- 시작 주소 해독 방법
- 명령어의 연산 코드를 특정 비트 패턴과 혼합시킴으로써, 그 연산의 수행에 필요한 실행 사이클 루틴의 시작 주소를 찾아낸다.
-
예시
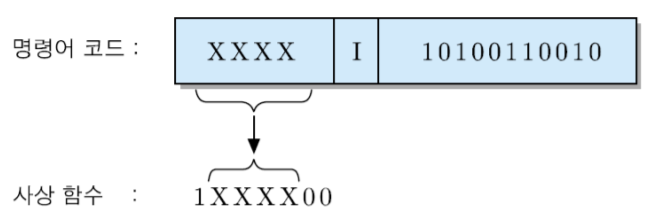
- OPCODE 앞에 ‘1’을 추가하고, 뒤에 ‘00’을 추가한다. ⇒ 이것이 해당 명령어가 포함된 루틴의 시작 주소이다.
- 연산 코드 = 0001 ⇒ 시작주소 = 1000100
- 연산 코드 = 0100 ⇒ 시작주소 = 1010000
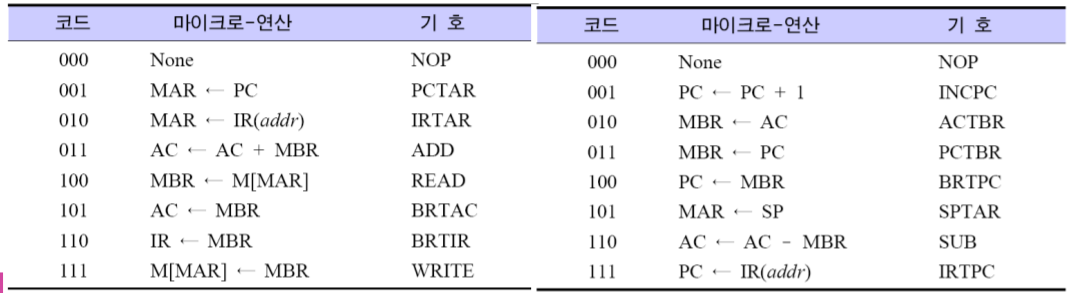
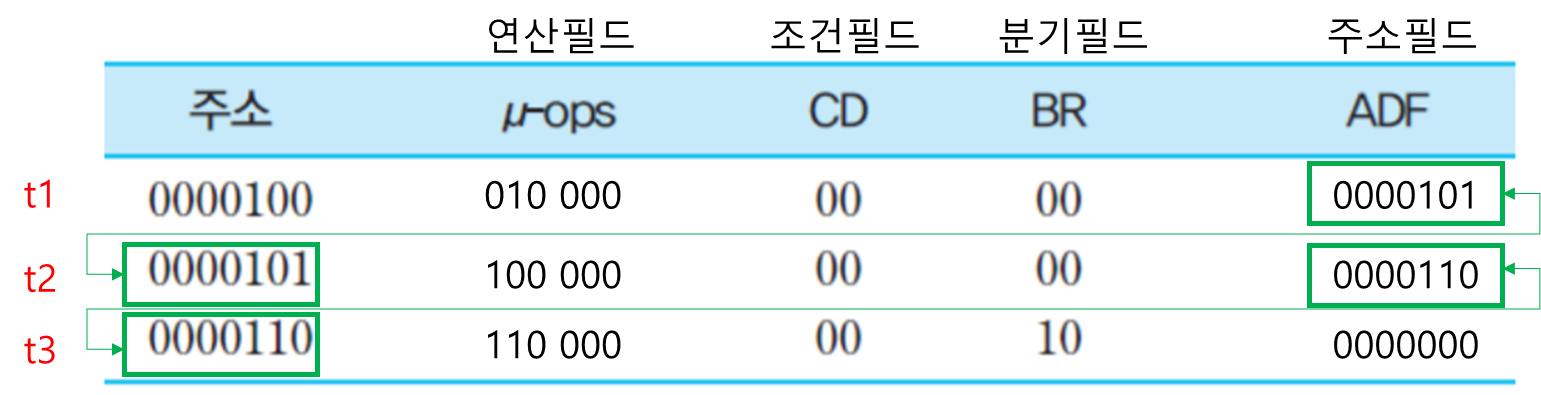
마이크로명령어의 형식 예시
- 연산 필드가 두 개이면, 두 개의 마이크로-연산들을 동시에 수행할 수 있다.
- 조건 필드 (CD)
- 분기에 사용될 조건 플래그를 지정한다.
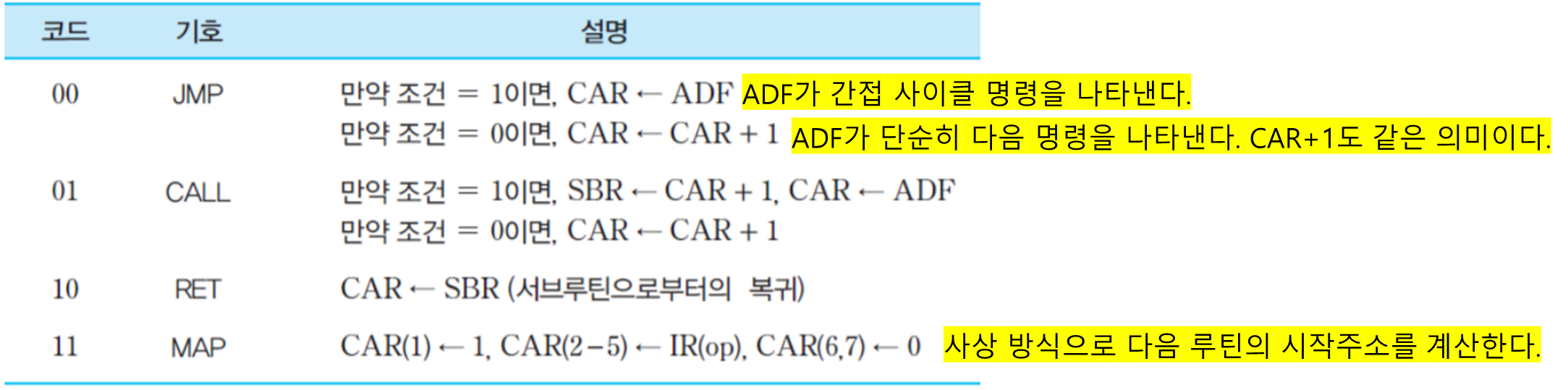
- 분기 필드 (BR)
- 분기의 종류와 다음에 실행할 마이크로명령어의 주소를 결정하는 방법을 명시한다.
- 주소 필드 (ADF)
- 분기가 발생하는 경우: 목적지 마이크로명령어의 주소
- 분기가 발생하지 않는 경우: 다음에 실행할 마이크로명령어의 주소

위 경우, 연산필드가 2개이다.
-
마이크로명령어 코드 예시
-
조건 필드 예시
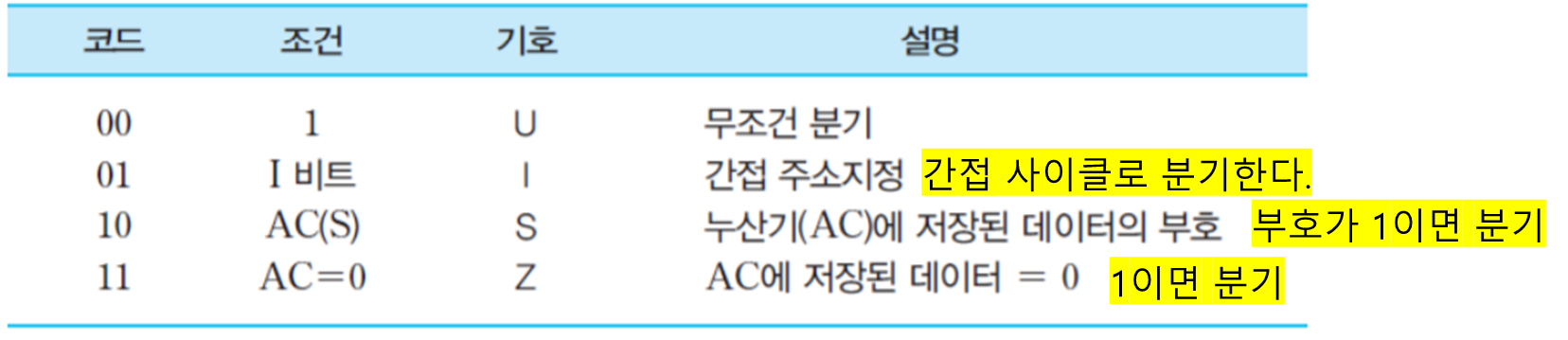
-
분기 필드 예시
마이크로프로그래밍 예시
-
인출 사이클 루틴
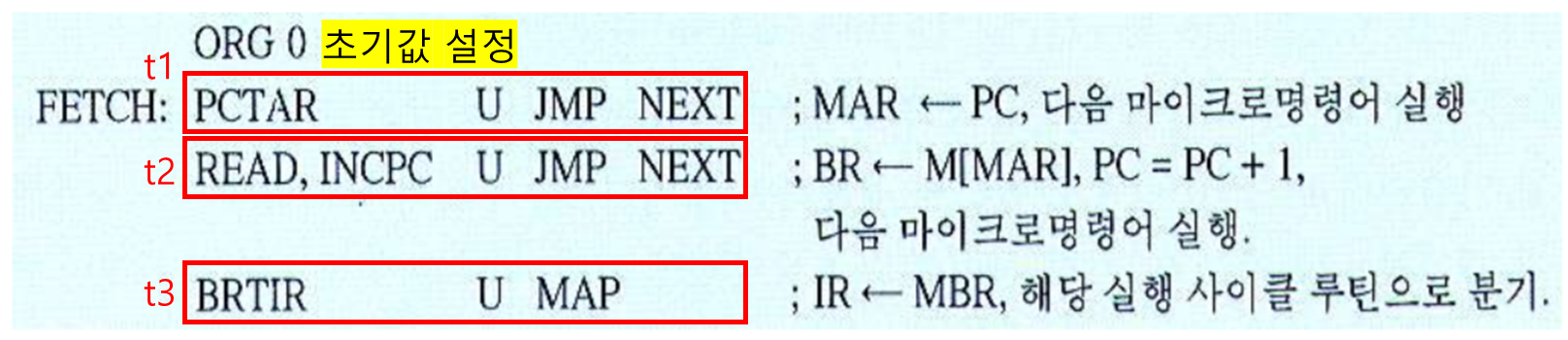
- 변환된 마이크로명령어 형태
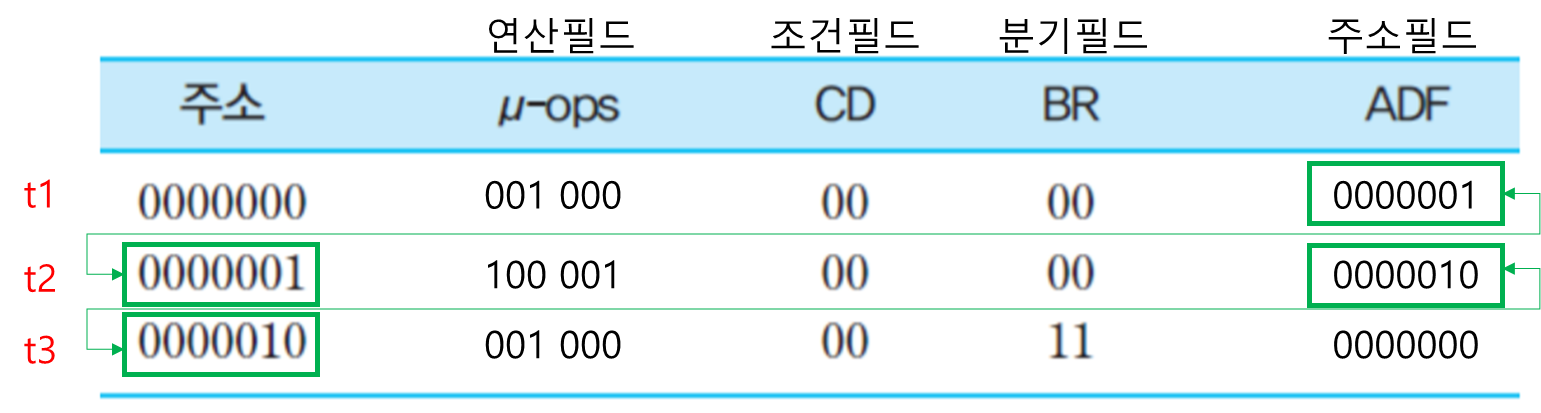
-
간접 사이클 루틴
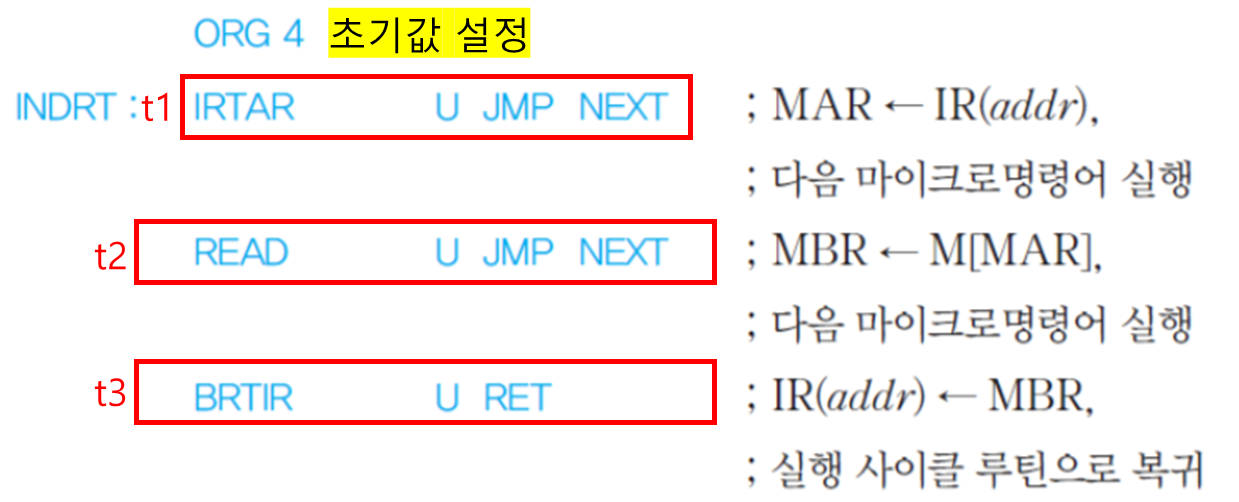
-
변환된 마이크로명령어 형태
-
실행 사이클 루틴
- 사상 방식을 이용하여, 각 연산 코드에 대한 실행 사이클 루틴의 시작 주소를 결정하고, 각 명령어 실행을 위한 루틴을 작성한다.
-
각 연산 코드에 대한 사상 결과
마이크로 명령어 구조
수직적 마이크로명령어
- 코드화된 비트들을 이용해, 마이크로명령어의 각 기능 코드를 구성하는 구조이다.
- 해독기(Decoder)를 이용해, 그 코드를 필요한 수만큼의 제어 신호로 확장한다.
- n개 비트의 연산 코드 ⇒ 총
개의 제어 신호를 생성할 수 있다.
- n개 비트의 연산 코드 ⇒ 총
- 수행될 각 동작에 대해, 하나의 코드를 사용한다.
- 특징
- 제어 기억장치의 용량 절감
- 코드화되어있으므로
- 약간의 논리회로와 시간 지연 추가
- 수평적 마이크로명령어보다 간결
- 병렬 처리에 제약
- 제어 기억장치의 용량 절감
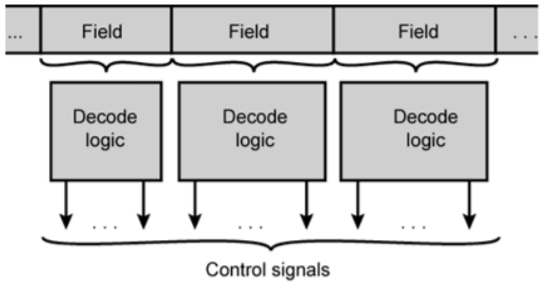
수평적 마이크로명령어
- 마이크로명령어의 각 필드의 비트가 제어 신호에 대응된다.
- 마이크로명령어는 병렬로 수행될 수 있는 다수의 마이크로-연산을 지정한다.
- ‘프로세서 내부의 각 제어선’과 ‘시스템 버스의 각 제어선’에 대해 한 비트씩 할당한다.
- 비트값이 1인 모든 제어선을 on 시키고, 0인 제어선을 off시킨다.
- 조건 비트에 따라, 마이크로명령어의 순서를 제어한다.
- 특징
- 하드웨어가 간단하고, 해독에 따른 지연이 없다.
- 마이크로명령어 비트수가 길기 때문에, 큰 용량의 제어 기억장치가 필요하다.
- 병렬 처리가 가능하다.
- 성결대학교 컴퓨터 공학과 최정열 교수님 (2021)
- William Stalling, 『컴퓨터시스템구조론(10판)』